 Ukraine
Ukraine
 Uzbekistan
Uzbekistan
 Poland
Poland
 South Africa
South Africa
 Nigeria
Nigeria

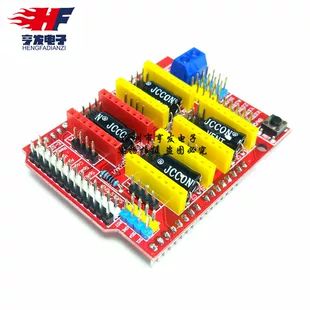







A4988 drayver kartasi cnc qalqon v3 o'yma mashinasini kengaytirish platasi 3D printer
Original saytga havola
Narxi
0,46 $
0,46 $
Sotuvchi kodi
602995762557
Xususiyatlari
- brend Hengfa Electronics
- rangi bo'yicha saralash shield v3 o'yma mashinasini kengaytirish platasi, A4988 step motor drayveri, v3 o'yma mashinasini kengaytirish platasi + 4 ta A4988 moduli
Sotuvchi jiexiong39348628

- Ism jiexiong39348628
- Magazin 亨发电子 模块 元器件 配单 IC芯片 工具
- Joylashgan 广东深圳
- Sharhlar 0
- Ijobiy 0
- Yetkazib berishni baholash 4,84
- Mahsulotni baholash 4,80
- Xizmatni baholash 4,80
- 100 — 1999 шт 5000$/donasiga
- 2000 — 50119 шт 4000$/donasiga
- 50120+ шт 3000$/donasiga
Mavjud 200 dona
0,46
$
+ Xitoy ichida yetkazib berish
0,43$
Mavjud emas
1,5$ foto hisobot + tekshiruv
Biz tovarni tekshiramiz va foto hisobot tuzamiz, shunda siz to'g'ri mahsulotni olganizga ishonch hosil qilishingiz mumkin.
Foto otchet qo'shish
Xitoydan Ukraina, O'zbekiston, Yevropa davlatlariga yetkazib berish.
Yetkazib berish, Xitoyda omborga kelganda to'lanadi
Mahsulotlarni qaytarish faqat bizning Xitoydagi omborimizda bo'lganida mumkin. Xitoydan jo'natilgan narsalarni qaytarib bo'lmaydi.
Foto va mahsulot tavsifi
资料 https://pan.baidu.com/s/1qXOZ25Q
http://yunpan.taobao.com/s/1QYwbg2DyHH
一、 产品介绍
该扩展板可用作雕刻机,3D打印机等的驱动扩展板,一共有4路步进电机驱动模块的插槽,(注意本板子不包含A4988步进电机驱动模块,需要可在本店另购),可驱动4路不进电机,而每一路步进电机都只需要2个IO口,也就是说,6个IO口就可以很好的管理3个步进电机,使用起来非常的方便,告别传统步进电机操作繁琐。
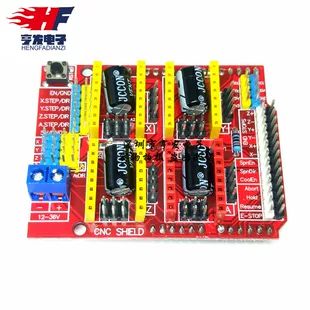
二、Arduino UNO 与模块IO口对应关系介绍
步进电机的基本控制需要的引脚,其他引脚是在雕刻机,或3D打印机的时候才用到的,这里我们不作详解,IO对应如上图。
Arduino UNO----------------------扩展板
8 ------------------------ EN (步进电机驱动使能端,低电平有效)
7 ----------------------- Z.DIR(Z轴的方向控制)
6 ----------------------- Y.DIR(Y轴的方向控制)
5 ----------------------- X.DIR(X轴的方向控制)
4 ---------------------- Z.STEP(Z轴的步进控制)
3 ---------------------- Y.STEP(Y轴的步进控制)
2 ---------------------- X.STEP(X轴的步进控制)
//下面是简单的步进电机控制程序,
#define EN 8 //步进电机使能端,低电平有效
#define X_DIR 5 //X轴 步进电机方向控制
#define Y_DIR 6 //y轴 步进电机方向控制
#define Z_DIR 7 //z轴 步进电机方向控制
#define X_STP 2 //x轴 步进控制
#define Y_STP 3 //y轴 步进控制
#define Z_STP 4 //z轴 步进控制
/*
//函数:step 功能:控制步进电机方向,步数。
//参数:dir 方向控制, dirPin对应步进电机的DIR引脚,stepperPin 对应步进电机的step引脚, steps 步进的步数
//无返回值
*/
void step(boolean dir, byte dirPin, byte stepperPin, int steps)
{
digitalWrite(dirPin, dir);
delay(50);
for (int i = 0; i < steps; i++) {
digitalWrite(stepperPin, HIGH);
delayMicroseconds(800);
digitalWrite(stepperPin, LOW);
delayMicroseconds(800);
}
}
void setup(){//将步进电机用到的IO管脚设置成输出
pinMode(X_DIR, OUTPUT); pinMode(X_STP, OUTPUT);
pinMode(Y_DIR, OUTPUT); pinMode(Y_STP, OUTPUT);
pinMode(Z_DIR, OUTPUT); pinMode(Z_STP, OUTPUT);
pinMode(EN, OUTPUT);
digitalWrite(EN, LOW);
}
void loop(){
step(false, X_DIR, X_STP, 200); //X轴电机 反转1圈,200步为一圈
step(false, Y_DIR, Y_STP, 200); //y轴电机 反转1圈,200步为一圈
step(false, Z_DIR, Z_STP, 200); //z轴电机 反转1圈,200步为一圈
delay(1000);
step(true, X_DIR, X_STP, 200); //X轴电机 正转1圈,200步为一圈
step(true, Y_DIR, Y_STP, 200); //y轴电机 正转1圈,200步为一圈
step(true, Z_DIR, Z_STP, 200); //z轴电机 正转1圈,200步为一圈
delay(1000);
}
实验现象:步进电机反转一圈,停顿1秒,再正传一圈,如此循环。
值得注意的是:在接插A4988模块的时候注意不要插反,步进电机接线方式是:
2A ,2B 为一组(红,绿), 1A,1B为一组(蓝,黄)想改变方向,改变其中一组的位置即可,比如2A,与2B交换。
http://yunpan.taobao.com/s/1QYwbg2DyHH










